1. Требования, предъявляемые к
шпиндельным узлам модулей главного движения станков и методы их обеспечения.
Шп.
устр-во предназначено для обеспечения точного значения обрабатываемой детали
или инструмента. Шп. Уст. Входит в несущую систему станка и в значительной
степени определенное качество станка.
Требования, предъявляемые к ШУ
- точность вращения шпинделя
Характер-ся рад. и осевым биением (5-8 мкм)
шп. относительно базовых поверхностей (на которые уст-ся шпиндель). Наиболее
точные станки имеют биение 0,01-0,02 мкм.
-точность
опор
Подшипники выбирают примерно в 3 раза
точнее, чем допустимое биение шпинделя.
-
жесткость шп. устройства
Оценивается по отклонению т-ки, лежащей на
торце шп. и его оси. Наибольшее влияние на жесткость оказывает Dшп. (в 4-ой
степени), его вылет (в кубе).
-
виброустойчивость
Способность ШУ работать без резонанса. Часто
виброуст-ть станков на 40-50% определяется ШУ. Причины: дисбаланс деталей
(шкивов, втулок и т.д.), зубчатых колес, прерывистый хар-р резания, переменная
жесткость опор и т.п.
-
долговечность
Определяется долговечностью опор п-ков,
качеством регулировки и системы смазки.
-
обеспечение температурной компенсации шпинделя
В большинстве случаев ШУ проектируют так,
чтобы передняя опора была полностью закреплена, а задняя – плавающая.
-
быстрое и надежное закрепление детали или приспособления
-
минимальная себестоимость изготовления
В
ШУ применяются обычные конструкционные
стали Ст 45,50 Ст40Х,40ХН,
Твердость
HRC 48-56, термоулучшение
ХВГ,
40ХГР HRC 56-60
38ХМЮА,
38ХВФМЮА (HRC 63-68)
Ст
20Х, 12ХН3А (HRC 56-60)
2. Характерные варианты схем опор
шпинделя и особенности их выбора.
А)П-ки
с коническими роликами (сх. 3) применяют при больших
нагрузках.
Б)П-ки двухрядные роликовые с короткими цил-ми
роликами
(сх. 2 самые передние и задние). Отличаются высокой жесткостью и виброуст-ю,
т.к. ролики соседних рядов сдвинуты на полшага, что повыш-т их стабильность и
жесткость к углу поворота.
В)П-ки шариковые радиально-упорные (сх. 7)
максимально быстроходны и мин. потери на трение, но обл-т мин. жесткостью,
поэтому их часто применяют сдвоенными. При встреч. располож-ии (сх.7)
обеспеч-ся эффект «заделки», что увел-т работу при консольных нагрузках. При
расположении «гуськом» (сх.8 зад. оп.) жесткость удваивается, но осевая нагр-ка
воспр-ся т-ко в одну сторону.
Г)П-ки упорно-радиальные двухрядные работают в паре
с Б) (сх.4 перед. оп.)
и воспр-т осевую
нагр-ку в двух напр-ях. Быс-ть п-ка выше, чем упорного в1,5-2 раза, а
тепловыд-я – меньше. Д) П-ки упорные шариковые прим-т при средних
част.

3. Методика расчета шпиндельных
опор на точность.

П-ки
применяются беззазорные, обеспечивающие способность создания т.н.
предварительного натяга (т-ко радиального или рад-го и осевого), тогда точность
п-ков хар-ся рад-ным или осевым биением.

Для уменьшения
требования на точность нужно установить по нескольку подшипников в опорах.
Собственные
биения шпинделя – определяют расположение оси базирующей пов-ти относительно
осей базовых поверхностей шпинделя. При сборке необходимо обеспечивать
компенсацию.

Для обеспечения т-ти работы
опор можно при монтаже п-ков обеспечить биение в опорах в одну сторону.
4. Способы повышения точности вращения
шпинделя.
Методы повышения
т-ти работы опор:
- повышение
класса т-ти (дорого)
- монтаж
подшипников (м-но обеспечить биение в опорах в одну сторону)
- производить монтаж с учетом собственного
биения шпинделя; так ставить п-ки,
чтобы их суммарные биения были противонаправлены собственному биению шпинделя.
- установка
нескольких подшипников опоре
,где Z1 и Z2 – количество
п-ков в левой и правой опорах соответственно.
5. Методика расчета ШУ на жесткость.




у1 – деформация,
обусловл-я нежесткостью опор
у2 – собственная
нежесткость шпинделя.
y – суммарное
отклонение
j – жесткость шп.
с - податливость
jk – жесткость
консольной части
J1 – момент
инерции крнс. части

6. Способы повышения жесткости ШУ.

у1 – деформация,
обусловл-я нежесткостью опор
у2 – собственная
нежесткость шпинделя.

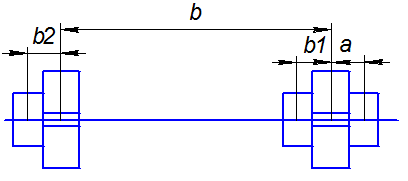
7.
Блок-схема автоматизированного проектирования шпиндельного узла модуля главного
движения.

δy
доп=∆/3
λ=b/a=2,5÷3
8. Особенности конструкции регулируемых шпиндельных
опор с подшипниками качения.
П-ки с коническими роликами обладают наибольшей жесткостью, мин-ной
быстроходностью и применяют при больших нагрузках. П-ки очень чувствительны к
установке натяга. Натяг осуш-ся смещением внутр. кольца отн-но наружного,
напр-р гайкой.

П-ки двухрядные роликовые с короткими цил-ми
роликами. Внутр-е кольцо п-ка уст-ся на коническую
(конусность 1:12) шейку шп., благодаря чему при осевом перемещении кольца
происходит его деформироваение и регултиривка натяга. П-ки отличаются высокой жесткостью
и виброуст-ю, т.к. ролики соседних рядов сдвинуты на полшага, что повыш-т их
стабильность и жесткость к углу поворота.

П-ки шариковые радиально-упорные максимально быстроходны и мин. потери на трение,
но обл-т мин. жесткостью, поэтому их часто применяют сдвоенными. При встреч.
располож-ии (рисуйте раструбами внутрь) обеспеч-ся эффект «заделки», что увел-т
работу при консольных нагрузках. При расположении «гуськом» (рисуйте в одну сторону раструбы)
жесткость удваивается, но осевая нагр-ка воспр-ся т-ко в одну сторону. Между
сдвоенными п-ми обычно располагают кольца и ими регулируют натяг, подшлифовывая
нижнее кольцо.

П-ки упорно-радиальные двухрядные работают в паре с радиальными и воспр-т осевую нагр-ку
в двух напр-ях. Быс-ть п-ка выше, чем упорного в1,5-2 раза, а тепловыд-я –
меньше. Натяг – за счет кольца.

П-ки упорные шариковые прим-т при средних част. вращения. Натяг должен
препят-ть смещ-ю шариков с дорожек под дейст-ем центробежных сил и искл-ть
поворот шариков. Для обеспеч-я этих треб-ий натяг д-н возрастать
пропорционально квдрату частоты вр-я.

П-ки радиально-упорные керамические двух типов: полностью керамические (напр-р из
нитрида кремния) или п-ки у к-х из керамики выполонены только шарики.
Быстроходность увелич-ся примерно вдвое, уменьшается нагрев (в 1,8 раза) и
имеют более низкий к-т трения и к-т линейного расширения.
9. Особенности
конструкции гидростатических опор шпинделей.
В качестве смазки прим-ся рабочая жидкость, масло с
низкой вязкостью.

Перемычки
образуют дроссели на вых. из карманов.
Давление в
кармане Рк обеспечивает работу подшипника.
Такая опора
обеспечивает автоматическое саморегулирование и поддерживает постоянное
положение оси шпинделя.

Плюсы: возможность
автоматич-го управления положением оси шпинделя , следовательно растет точность
обработки, высокая несущая способность (до 1000 т.), малый к-т трения в широком
диапазоне скоростей, высокое демпфирование (обеспеч-т работоспособ-ть п-ков при
больших ударных нагр.), редуцирование погрешностей обр-ки сопряженных пов-ей
опоры (позволяет применять п-ки и направляющие при высоких треб-ях к т-ти
перемещ-я рабочих органов станка).
10. Особенности конструкции
гидродинамических опор шпинделей.
Несущий
масляной слой образуется при вращении вала в результате затягивания масла в
клиновой зазор м/у рабочими пов-ями вала и вкладыша. Избыточное давление Р
возникает в начале сужения зазора и заканчивается за т-кой минимального зазора
в его расширяющейся части.
А)
одноклиновые (не обеспеч-т высокой жесткости и стабильного полож-я вала при
больших скоростях скольжения и малых нагрузках. Поэтому В ШУ НЕ ПРИМЕНЯЮТСЯ)

1корпус
опоры; 2 – поверхность шейки шпинделя.
Ось
шпинделя смещается, и появляется повышенное давление. Подъемная гидравлическая сила поднимает
шпиндель обратно. С- эксцентриситет.
Б)
многоклиновые: - создание неск-х
(3-х) клинов за счет фасонных отверстий
- - || - || - || - за счет плав-их опор
(башмаков)
Благодаря взаимному нагружению масляным слоем
обеспечивается высокая жесткость несущих масляных слоев, стабильность положения
оси шпинделя при работе как под нагрузкой, так и при холостом ходе

Комментариев нет:
Отправить комментарий